Aside from the balloon and the helium, the tracking system is arguably the most important part of a high-altitude balloon system. Unless you’re planning on a one way trip to points unknown, a reliable tracking system is necessary to get your payload back safely. There are a number of different solutions that teams use for tracking their HAB projects.
- A lot of teams use the SPOT satellite tracking system, which was originally designed as an emergency Personal Locator Beacon for sailors and backcountry travelers. The SPOT is relatively inexpensive, simple to use and reliable pretty much any place on earth.
- Other teams use smartphone-based systems which have onboard GPS tracking apps that essentially call home once they’ve landed and report their final position. These seem to be a bit more finicky and dependent on cellular network coverage – not something we want to rely on.
- The third common solution is an APRS beacon, which uses a GPS receiver to determine position and broadcasts that position (along with a callsign) on a fixed frequency in the 2 meter amateur radio spectrum. That broadcast is picked up by internet-connected gateways that again relay the location to APRS services like aprs.fi and others. It does requires a ham radio license to use, which is probably a deterrent for some people. Fortunately, I’ve had a technician class license since I was a freshman in high school (made me extra popular with the ladies). From the altitudes we’ll be flying, a relatively low power unit can broadcast hundreds of miles, so we should have a pretty reliable system working for us.
Originally, I planned to use a Tracksoar APRS beacon as our primary tracking system. When they fell short of their Kickstarter funding target, I started checking out other options and quickly settled on a Beeline 2M APRS beacon from BigRedBee. I have another one of their 70cm (non-GPS) tracking beacons (beep, beep, beep) that I’ve used for a few rocket launches. It arrived back in January and I’ve been playing around with it since.
The BRB system has a couple of drawbacks from my point of view. First, It’s not an extensible, open source system. I would really like to latch some additional sensors onto the board and have their data recorded alongside the GPS data so they are synchronized. Not really an option with BRB. The second drawback is the programming software; it’s only available as a Windows application. We have four computers in our house…all Mac. There are ways around this, but none are convenient. This is the type of issue that is easily solved with an open source project. At the same time, I can appreciate why someone would choose to keep their system closed and protect their IP. Despite those limitations, the strength of the Beeline is that it’s flight proven in both rocketry and balloon applications, with hundreds, if not thousands, of launches. The Beeline unit is also much more powerful, with 1W and 5W transmit modes, depending on the input voltage.
Testing & Modding the Beeline
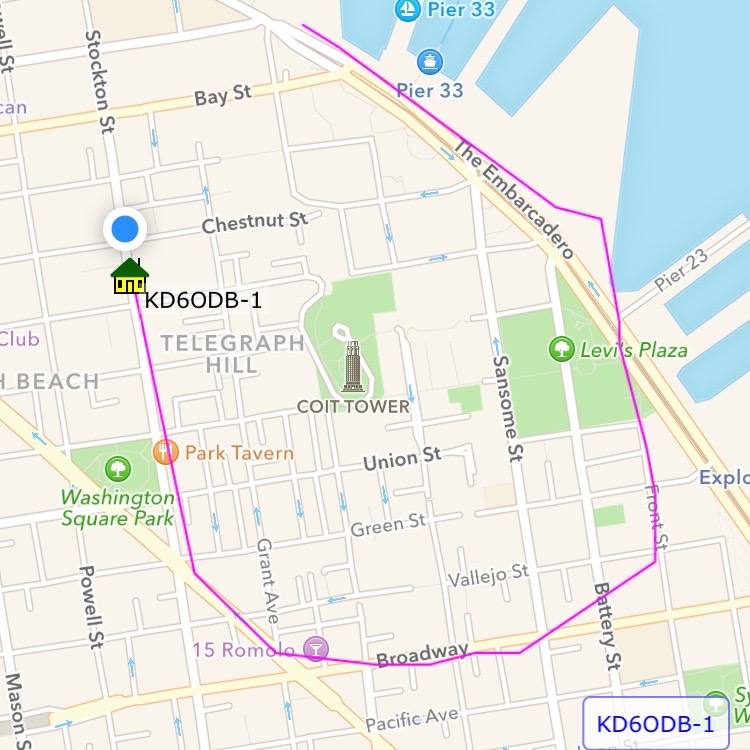
After I got the Beeline unit in hand, I did a couple of tracking tests. I fired up the unit, dropped it in my backpack and started walking. I used aprs.fi (both the website and the iOS app) to see how well it was tracking my location. It did a nice job keeping a bead on me as I wandered around the waterfront near my office. The unit was hitting an APRS iGate about 12 miles away, on the other side of the bay (San Pablo). When I got in and around taller buildings downtown, the systems struggled, which was no surprise. This obviously won’t be an issue when we’re using it in a balloon payload.
The beeline came with a customized pelican case and battery pack that held six AA batteries. It’s a nice, sturdy package, but a bit pudgy for something being carried aloft by a surplus of He2. I weighed out every component of the system:
- Beeline transmitter: 31.9 g
- Empty battery holder: 50.9 g
- Empty pelican case: 167.9 g
- Energizer lithium AA batteries (6): 87 g
- Whip antenna: 11.2 g
During the flight, the Beeline unit will be encased in a foam cocoon, so the pelican case is redundant and unnecessary. The other area to save weight is power system. The included six-cell AA system is heavy and bulky. The Beeline needs a minimum of 4V to transmit at 1 watt, which should be more than enough for our purposes. I picked up a 2,000 mAh LiPo battery from Sparkfun. LiPo cells output 3.7V, so we’re running it through an Adafruit PowerBoost to bring it up to 5.2V. Initial tests look good, though we need to run some extended tests to see if 2,000 mAh will have enough capacity for a two- to three-hour flight. If not, we’ll push it up to a larger capacity cell.
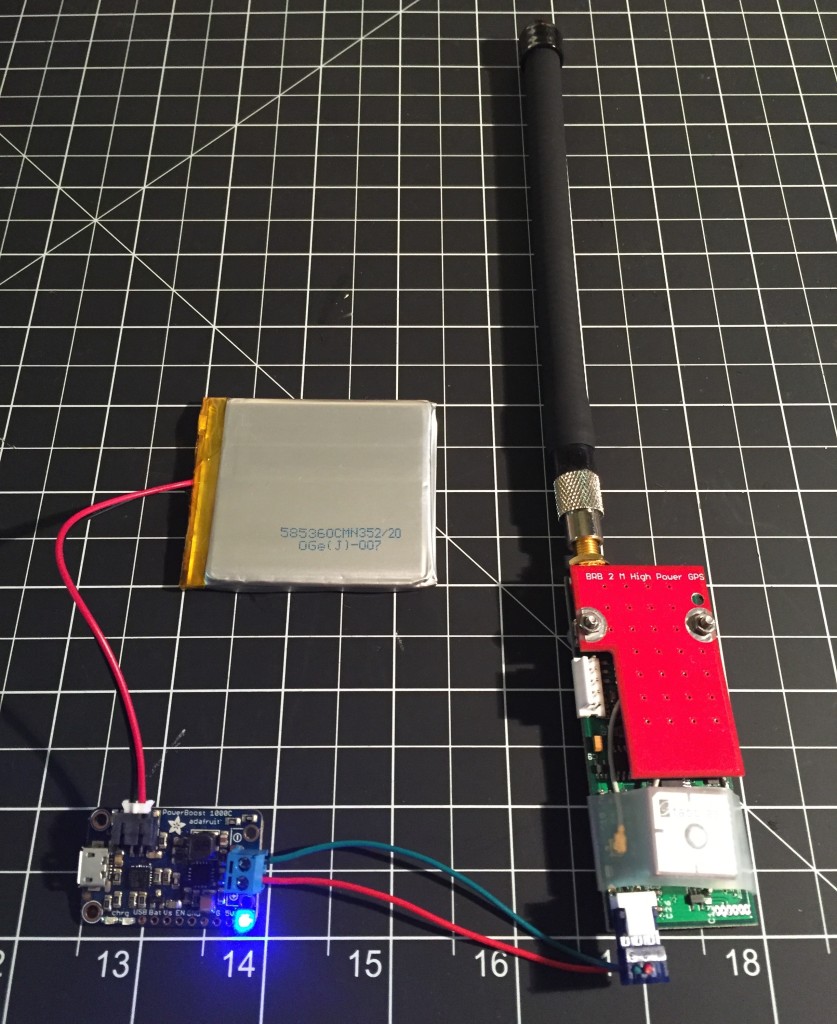
I also swapped out the whip antenna for a high-quality 2m rubber duck antenna. It’s a bit heavier, but more compact. The updated power system is a quarter pound lighter, and the total system is down by over half a pound:
- Beeline transmitter: 31.9 g
- Duck antenna: 36.9 g
- LiPo battery (2,000 mAh): 37.5 g
- PowerBoost: 5 g
Next up are some battery capacity tests and then we’ll begin dialing-in the payload bay itself. I’m still trying to decide if we should have a backup system (like a SPOT) for redundancy. We can handle the extra weight, but it adds another $200 or so to the cost of the launch – something I’m not eager to do.
Leave a Reply